
In questi anni stiamo assistendo ad un grandissimo progresso tecnologico, possiamo trovare Tv ultra sottili super definite, gadget indossabili ma anche visori di realtà aumentata. Oltre questi stiamo assistendo anche ad un progressivo ingresso da parte di velivoli a controllo remoto, i cosiddetti Droni.
Da un paio di anni alcune multinazionali, stanno sviluppando velivoli sempre più performanti con al loro interno la più recente tecnologia, ma quest’ ultimi sono molto dispensivi in termini economici. Quindi perchè non costruirsene uno Low Cost?
In questo articolo parlerò brevemente di come poter costruire il più semplice e basilare Drone, tralasciando le fasi di calibrazioni, in quanto sono differenti a seconda del controller di volo che scegliamo di prendere.
Prima di tutto dobbiamo valutare attentamente il nostro budget in quanto, ovviamente, maggiore è il budget maggiore sarà la qualità e soprattutto la stabilità del velivolo.
In secondo piano va stabilita la configurazione. La più comune è un drone, che da ora chiamerò multirotore, a 4 motori con formazione ad X. Nessuno però ci vieta di poterne creare uno ad 6 o ad 8 motori, ma va ricordato che il minimo di rotori è di 3.
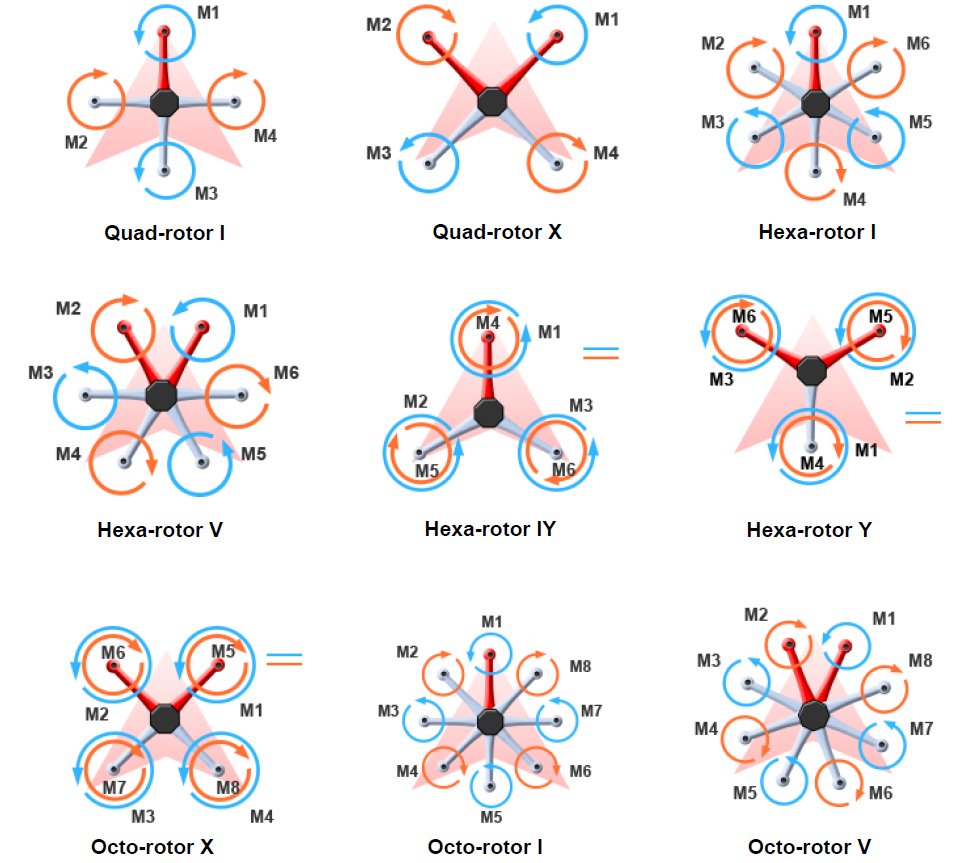
Possibili Configurazioni
Dopo aver scelto la sua configurazione entriamo nel vero e proprio momento della costruzione.
I componenti che dobbiamo procurarci sono:
- Frame del multirotore, ovvero il supporto dove installeremo tutti i componenti. Se si ha un budget elevato consiglio uno in fibra di carbonio in quanto il fattore peso in questi velivoli è fondamentale.
- Kit di radiocontrollo (formato da ricevitore e controller).
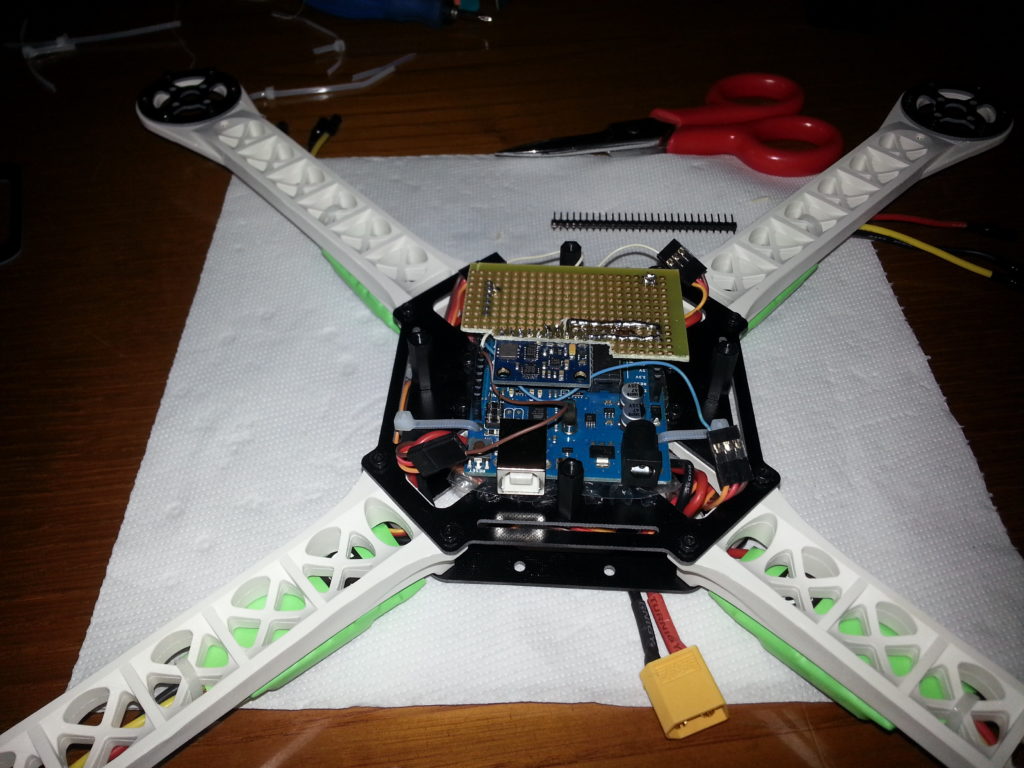
- Controllore di volo (Flight Controller). Attenzione questo è il componente più importante in quanto è il processore che gestisce le funzioni di stabilità. Volendo risparmiare ancora si può usare una scheda Arduino Uno, connessa ad un modulo avente accellerometro e giroscopio( nel mio caso ho usato Arduino Uno con un modulo GY-80), ma personalmente è una cosa che sconsiglio a tutti, sia per la difficoltà di calibrazione post-assemblaggio, sia perchè questi moduli hanno una bassa sensibilità e di conseguenza si avranno enormi difficoltà nel pilotare il multirotore.
- Motori Brushless. In questo caso prima di scegliere i motori bisogna valutare lo scopo per il quale stiamo costruendo il drone. Se lo useremo per riprese aeree bisogna scegliere motori aventi giri/minuto inferiori a 1000( consiglio 900), nel caso in cui si vuol creare un multirotore da “Competizione” si possono scegliere addirittura motori aventi 2200 giri/minuto.(Per il mio uso hobbistico ho scelto quelli da 1200 giri). Oltre ciò bisogna anche aver cura di controllare il consumo massimo espresso in Ampere, perchè conoscendo questo valore possiamo passare all’ultimo acquisto ovvero gli ESC.
- Regolatori di velocità chiamati ESC. Per acquistare questi componenti bisogna avere molta cura in quanto se non idonei si rischia di bruciarli in volo, e di procurare un crash del multirotore. Niente paura… la regola vuole che quest’ultimi abbiano un valore in Ampere più alto dei motori scelti. Considerando che anche il passo delle eliche influenza il consumo massimo del motore, che può aumentare fino a un circa 15%, bisogna scegliere un ESC che abbia valore 1/3 in più del valore dei motori. Esempio: Motori 20A , ESC 27A ( considerando che non esistono da 27A si abbonda a 30A)
- Scheda di distribuzione della corrente, da collegare tra ESC e batteria
- Batteria. Vi sono di varie capacità e di vario fattore di scaricamento S. Maggiore è la capacità, maggiore sarà la durata del volo, ma d’altra parte maggiore sarà il peso. Il fattore scaricamento influisce sulla tensione. In particolare maggiore sarà il fattore della batteria, maggiormente la batteria riuscirà a mantenere stabile la tensione anche con batteria semi scarica.( Tensione più stabile = nessuna perdita di velocità dei motori)
- Set di eliche. Anche in questo caso vale il fatto di capire l’uso che se ne farà del multirotore. Per maggiore stabilità si preferiscono eliche più lunghe con passo più corto, per maggiore propulsione eliche più corte con passo più lungo. Ricordo che un passo maggiore equivale ad un consumo maggiore del motore, il famoso 15% che citavo prima. ( nel mio caso ho usato eliche da 9″ con passo intermedio”).
Avendo tutto il necessario possiamo tranquillamente assemblare il tutto. Non spiegherò passo passo come collegare i vari componenti, in quanto è di facilissima fattibilità. Ogni componente ha già i giusti attacchi preimpostati, sta a noi collegare il tutto.
Come sopra accennato per quanto riguarda la calibrazione, essa dipenda dal tipo di Flight controller che scegliete. Infatti acquistandone uno trovete la documentazione su come settarlo e calibrarlo correttamente.
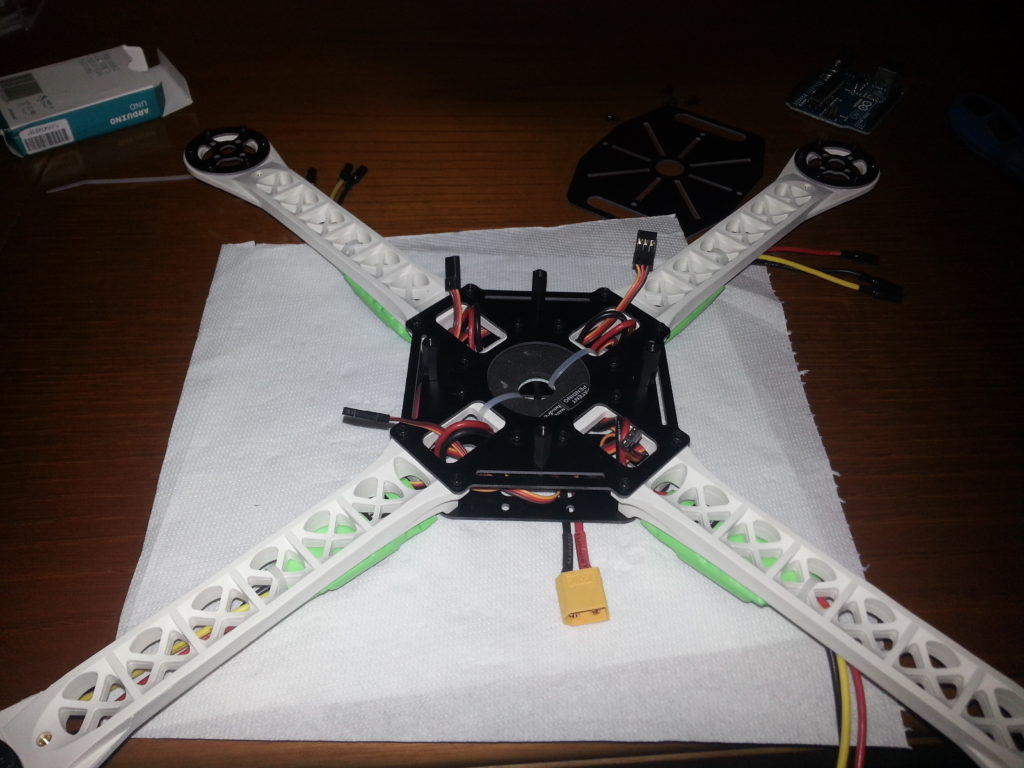
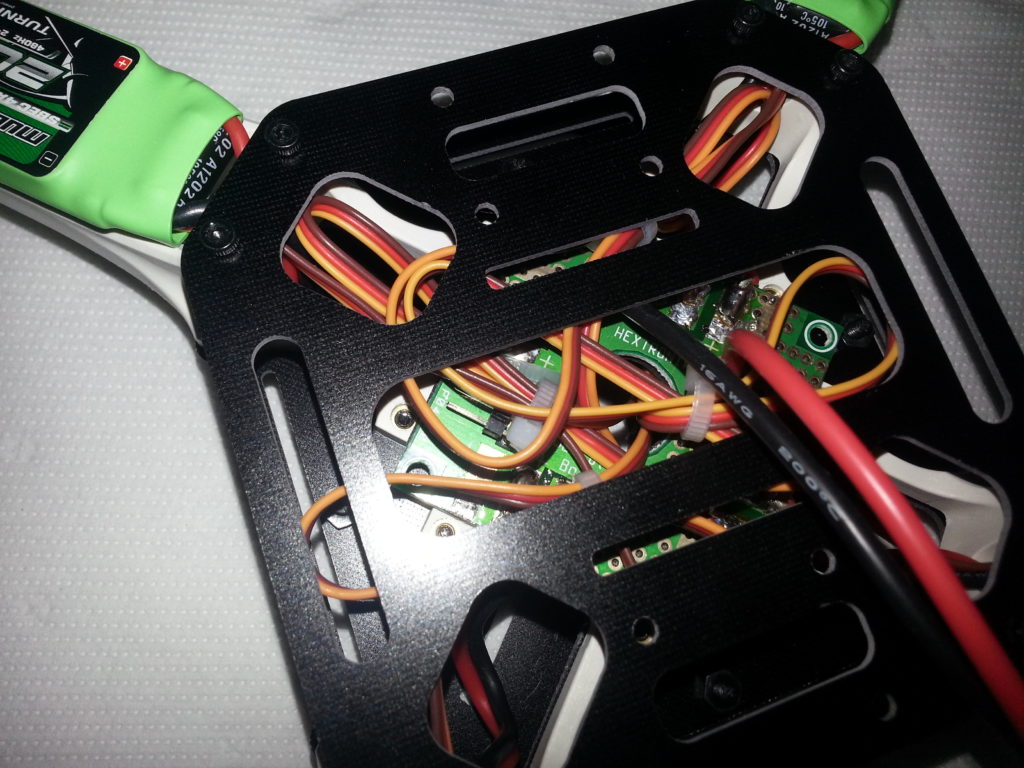
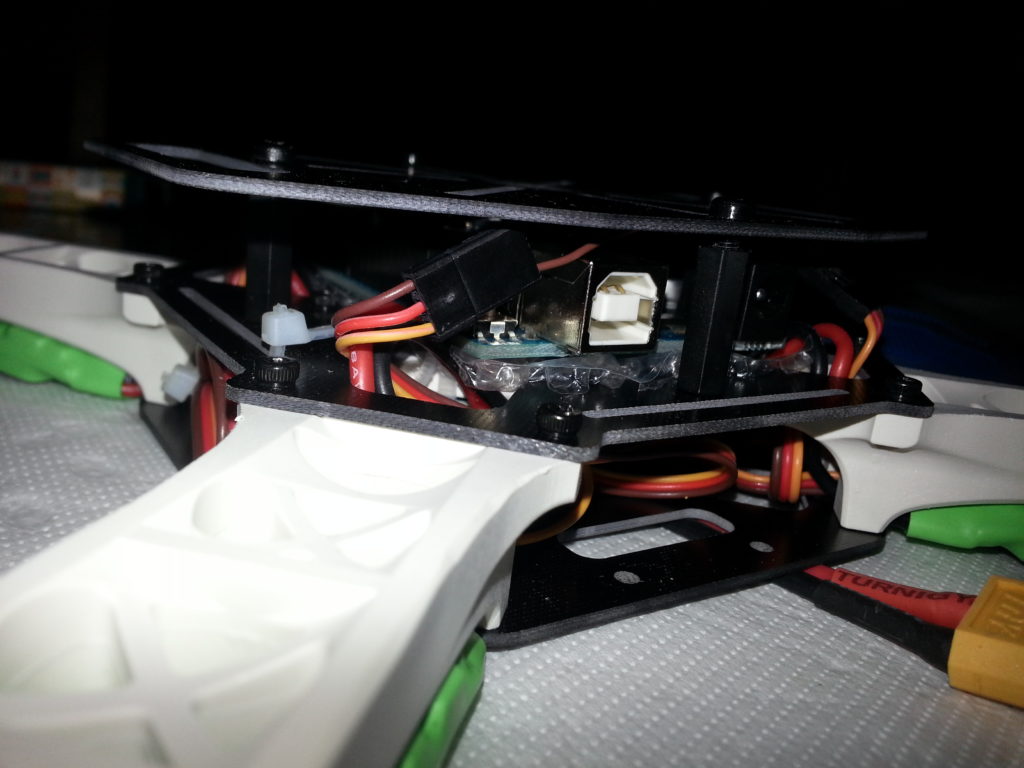
Detto questo lascio qualche foto della costruzione del mio, ormai avente 2 anni, multirotore.

Qui troverete, un breve video riguardante il primo volo: https://www.youtube.com/watch?v=PYDOnyFpSZk